Introduction
The Typewriter Repairmen is an underwater robotics team composed of the extended Forbes family of southern Arizona. In June of 2009, we entered the National Underwater Robotics Competition in Chandler, AZ and won the contest using our first ROV named notBOB. We competed in every NURC challenge since that year.
2023 was a challenging year for NURC. The COVID pandemic killed the momentum of the event, and there was no kit available for new teams to get a head start. The Typewriter Repairmen built an ROV called Casper in 2019 using parts from a popular supplier of underwater robotics hardware and modified it with a new/old control system for the 2023 challenge.
While we were at the 2023 event, we witnessed several teams suffer problems with the control systems in their ROV, resulting in their inability to do well in the contest. These problems ranged from not having enough time to complete the construction to balky cameras and Arduinos to cable management and wiring problems.
The Typewriter Repairmen were asked by the organizers of NURC, the Si Se Puede Foundation, to design an ROV kit that would allow teams with limited expertise and resources to compete in the challenge. As a direct result of this request, we have designed the ROVotron Cadet, a sophisticated and low cost underwater ROV.
we have decided to make the ROVotron Cadet available, at cost, to all teams in the NURC family. It is our hope that this will help level the playing field and permit more teams to compete at their full potential. Additonally, the plans and CAD files are being made avialable to anyone who wants to build the Cadet themselves, or to make improvements to the design.
The total parts cost of ROVotron is about $700. Soldering costs extra.
The ROVotron Cadet ROV
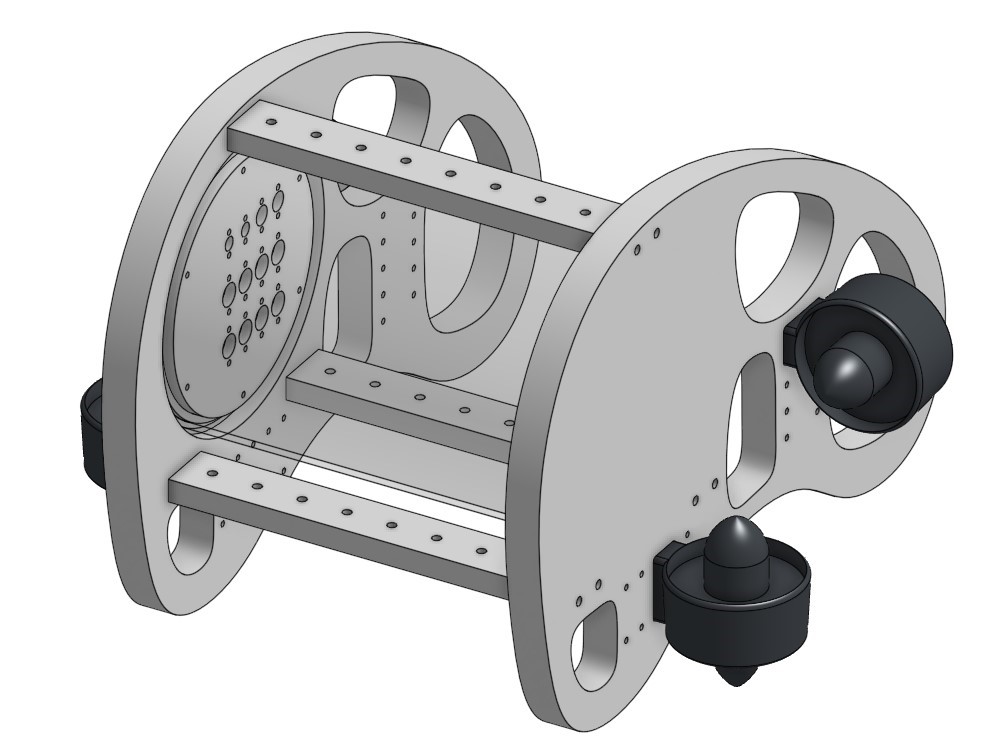
ROVotron Cadet is a small, agile, easy-to-drive tethered ROV. It has the ability to move in any direction and see where it's going in the dark with an illuminated video camera. A gripper claw allows the Cadet to perform tasks that require interacting with the field, such as pushing buttons, retrieving objects and moving levers.
The major parts of the Cadet system are:- The ROV body with six thrusters
- The Noggin, a sealed compartment that holds the ROV's brains
- A motorized gripper claw
- The topside controller and battery set
The Cadet is offered in kit form only. Teams may choose either a pre-soldered kit or one that requires some soldering of a circuit board and some wires. No surface-mount parts are used, to make soldering easier.

The Caddet ROV features:
- Controlled by an XBox One gamepad
- Holonomic drive system is fast and maneuverable
- All flotation is provided by the Noggin - no extra floats needed
- Lightweight tether provides for easy travel in tight passages
- Motorized gripper with variable speed control and strong jaws
- Analog video camera with one 10 Watt LED for night vision
- Camera tilts up and down for extra visibility
- Provided Teensy(Arduino) firmware pre-configured for ease of setup
- Telemetry inputs for analog and I2C digital sensors: temperature, depth etc.
The operator interface is an XBox One or equivalent game controller. This device was chosen for its wide availability and the fact that its USB interface protocol is supported by the Teensy computer.
ROVotron has a flexible configuration system that permits the operator to assign controller buttons and joysticks to ROV functions as desired to suit the requirements of any ROV. An LCD display on the transmitter box provides both a menu-driven configuration mode and a real-time telemetry display during the mission. Control gain, zero and polarity are easily changed on-the-fly. Even the telemetry display parameters are configurable at poolside.

The ROV contains a circuit board that connects to the control box via a tether made of Ethernet cable. The circuit board has a Teensy computer, power regulators and screw terminals for the tether, LED and camera power, motor speed contoller (ESC) power outputs.

The card cage is 4" wide by 2.7" tall by 2.5" deep. It is typically mounted to a metal plate to conduct heat from the motor controller transistors to the water. If the ROV uses a plastic electronics enclosure, then a standard CPU cooler may be mounted to the card cage to remove the heat.

The Tether and Power
The ROVotron Cadet is powered over the tether from a 24V poolside battery box, rather than having a battery pack onboard the ROV. This reduces the mass of the ROV, simplifies the design and reduces the thrust required. The choice of 24V power permits the use of a small 14 gauge power tether cable for up to 50 feet.
The ROVotron Deluxe version is powered with an internal 22.2V, 8000mAH LiPo battery pack in the Noggin, aboard the ROV. This permits the use of much longer tether cable up to 300 feet for exploring lakes and oceanside locations. This version has an extra cost, and the ROV is 4 inches wider to provide the additional flotation needed for the battery pack.
The signal tether is Cat-5 Ethernet cable. It carries RS-485 serial data, video and audio, and delivers 12V power back from the ROV to the transmitter box to power its computer and display. All signals are balanced pairs to greatly reduce electrical interference for a clear picture and trouble-free operation.
The signal tether, the power tether, and a buoyancy strand are braided together into an easy-to-handle package with no lumps or bumps to snag on itself.
Detailed Information
The menu at the top of the page leads to pages describing the control transmitter, the ROV frame and Noggin, the bottom control board and the software that controls the ROVotron Cadet. Feel free to read any or all of it.
The ROVotron User Manual is available for download. It is a work in progress.
The ROVotron bill of materials is available for download. It is a work in progress.
The RVTOP-C code sketch is here.
The RVCBOT-D code sketch is here.
The RVTOP-C schematic diagram is here.
The RVCBOT-D schematic diagram is here.
These pages will be updated frequently as the system is built and comes to life. Keep visiting for updates.